Mean-shift exploration in shape assembly of robot swarms
By A Mystery Man Writer
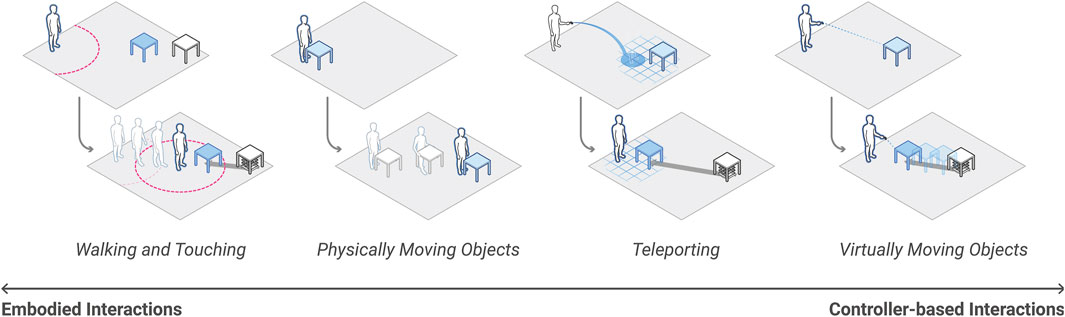
Frontiers Designing Expandable-Structure Robots for Human-Robot Interaction

IEEE-RAL-2022] Aerobatic Tic-toc Control of Planar Quadcopters via Reinforcement of Learning

Roderich GROSS, Senior Lecturer, PhD, The University of Sheffield, Sheffield, Sheffield, Department of Automatic Control and Systems Engineering
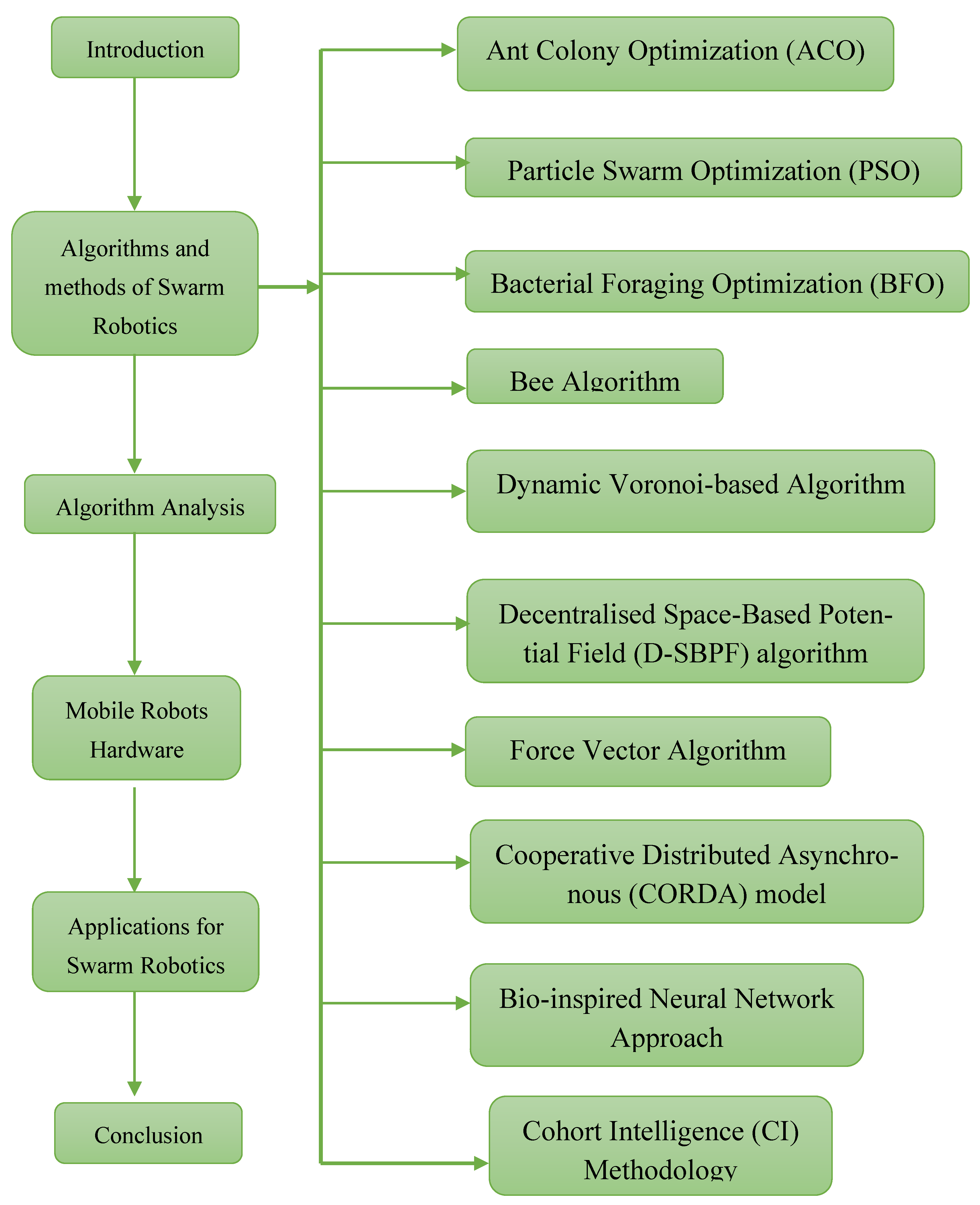
Algorithms, Free Full-Text

News, ACSE
Applied Sciences, Free Full-Text

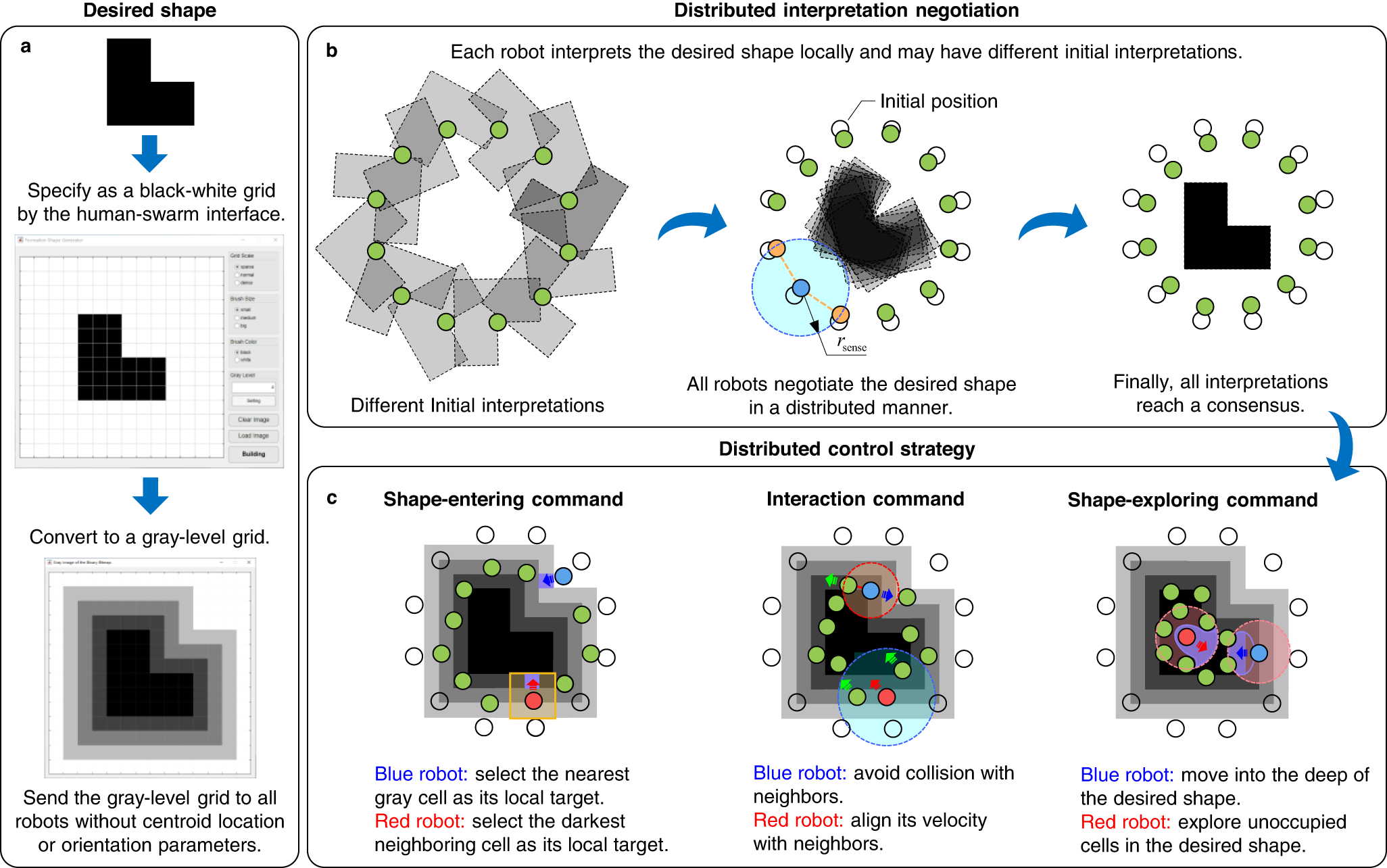
Mean-shift exploration in shape assembly of robot swarms

A parallel shape formation method for swarm robotics - ScienceDirect
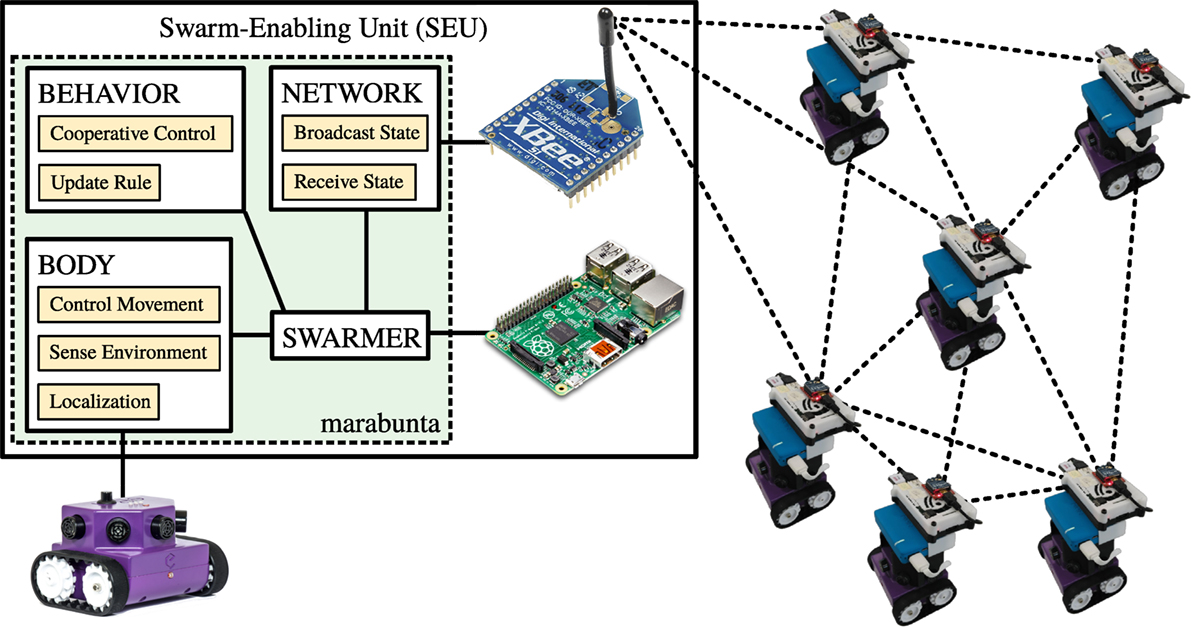
Frontiers Swarm-Enabling Technology for Multi-Robot Systems

Mean-shift exploration strategy greatly improves the efficiency of robot cooperation
Research articles Nature Communications

Mean-shift exploration strategy greatly improves the efficiency of robot cooperation

IJRR-2024] Novel Bearing-Angle Method Significantly Enhances the Visual Localization Observability.


- Reliable Drill Brushes Manufacturer in China

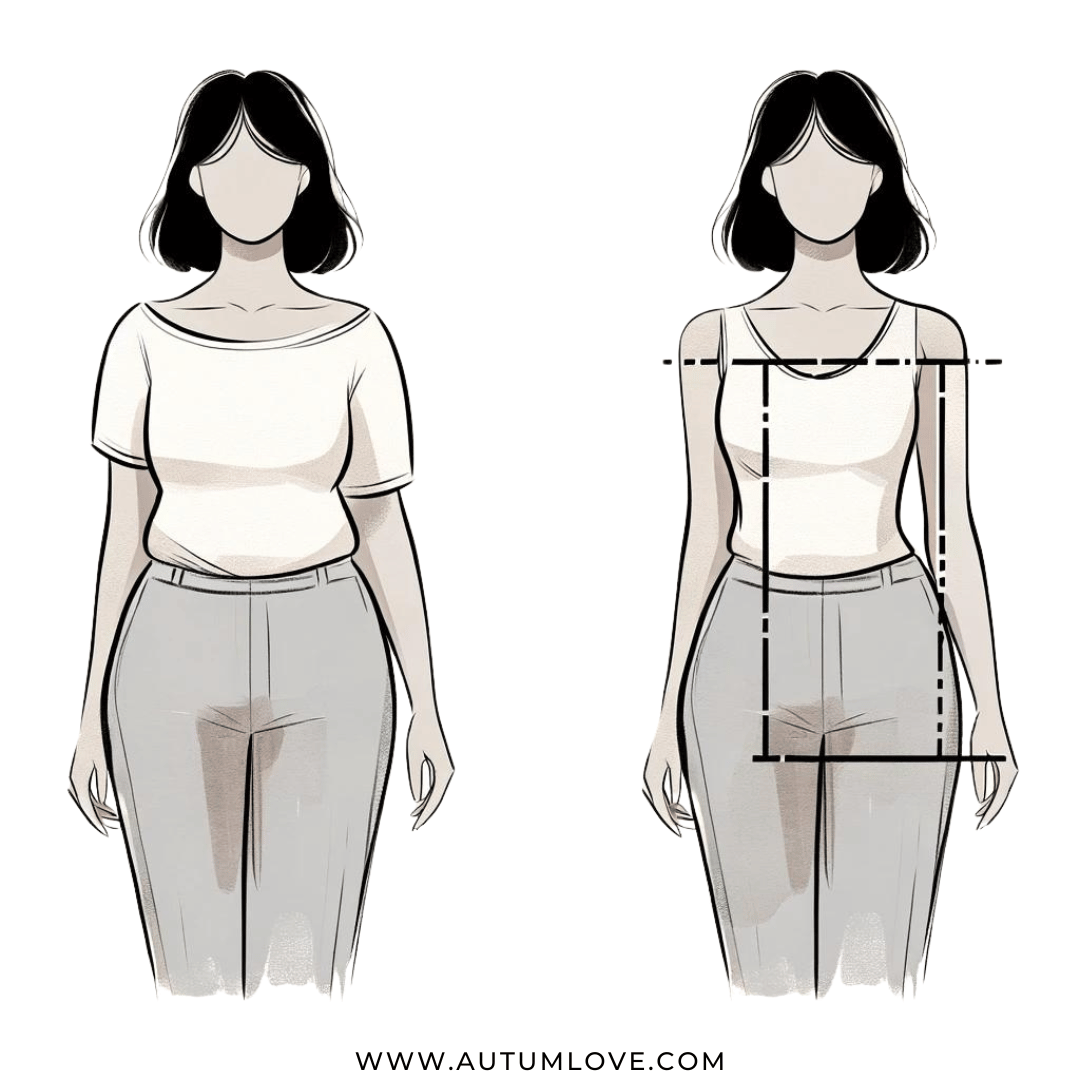
- Fila Women's Imelda Tights Grey Marl/Peacoat Small at

- One Piece Apparel - Official Merchandise & Unique Designs

- 4pcs/set Women's Rash Guards Long Sleeve Shirt+Sports Bra+Briefs+Leggings Swimsuit Bikini Beach Swimwear Cover Up Swim Tights - AliExpress

- Victorian Underwear,edwardian Dress,german EDITION Österr. Wäschezeitung 1915-09