C-ALEX, a cable-driven unilateral leg exoskeleton designed for gait
By A Mystery Man Writer

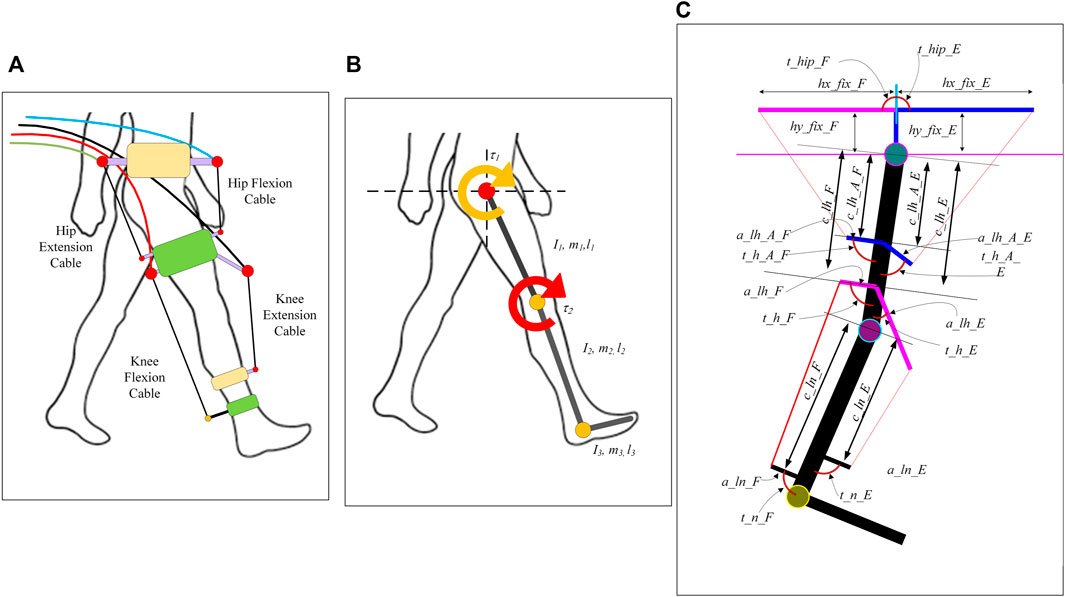
Muscle-inspired bi-planar cable routing: a novel framework for designing cable driven lower limb rehabilitation exoskeletons (C-LREX)

Gait Adaptation Using a Cable-Driven Active Leg Exoskeleton (C-ALEX) With Post-Stroke Participants

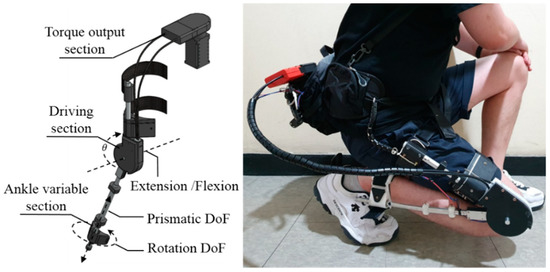
Biomechanical design and control of an eight DOF human lower extremity rehabilitation exoskeleton robot - ScienceDirect
Sensors, Free Full-Text
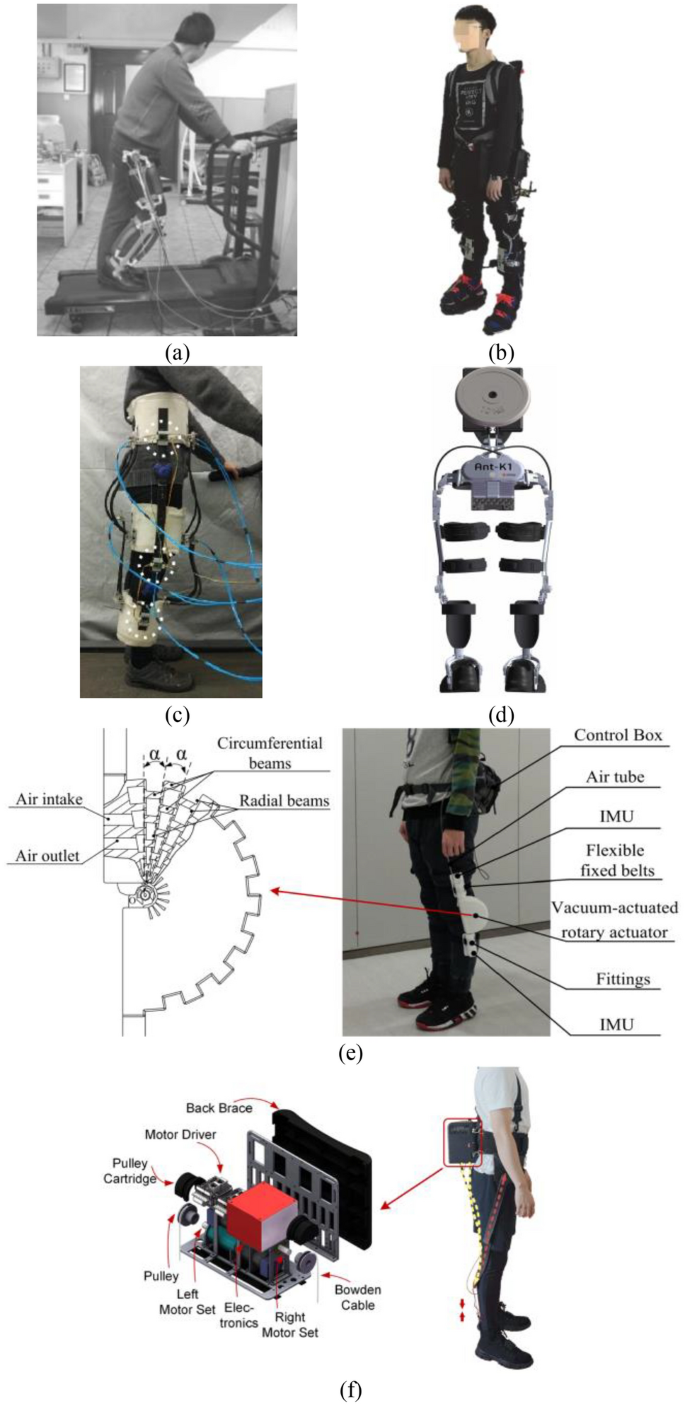
Systematic Review on Wearable Lower Extremity Robotic Exoskeletons for Assisted Locomotion

Joost GEEROMS, PostDoc Position, PhD, Vrije Universiteit Brussel, Brussels, VUB, Department of Mechanical Engineering (MECH)

C-ALEX, a cable-driven unilateral leg exoskeleton designed for gait

A Review on Lower Limb Rehabilitation Exoskeleton Robots, Chinese Journal of Mechanical Engineering
C-ALEX worn in Active/Transparent mode (left) and in Passive mode (right)
Frontiers A Framework for Determining the Performance and Requirements of Cable-Driven Mobile Lower Limb Rehabilitation Exoskeletons

Systematic Review on Wearable Lower Extremity Robotic Exoskeletons for Assisted Locomotion
- Sexy Long Female Legs In Leg Cuffs Against Texturized Background Stock Photo, Picture and Royalty Free Image. Image 70690051.

- How to Cuff Em'! Ask and you shall receive - a quick tutorial on how t, Wide Leg Jeans
- Leg irons iron hi-res stock photography and images - Alamy

- Leg Cuffs Stock Photos - Free & Royalty-Free Stock Photos from Dreamstime
- DOUBLE PADDED LEG CUFFS FOR SUSPENSION






